
一、概述
openvela 的视频编解码框架借鉴了 Linux 内核的 Video for Linux 2 (V4L2) 框架,并重点实现了其 Memory-to-Memory (M2M) 模型。在 Linux 中,v4l2m2m 是一个标准模块,专用于处理需要内存作为输入和输出的硬件,如视频编解码器(Codec)。
通过在 openvela 中引入 v4l2m2m 接口,我们成功统一了视频编解码驱动框架,为南向芯片厂商提供了标准的编解码驱动接入层。这使得第三方硬件可以便捷地集成到 openvela 生态中,显著降低了开发和适配成本。
V4L2 M2M 整个框架的核心点在于复用 V4L2 框架的 frame buffer 管理模块,增加一路 output queue,用于接收编解码器输入数据,原始 capture queue 用于存放编解码器的输出数据。下图以视频解码为例,展示使用M2M框架的处理流程。
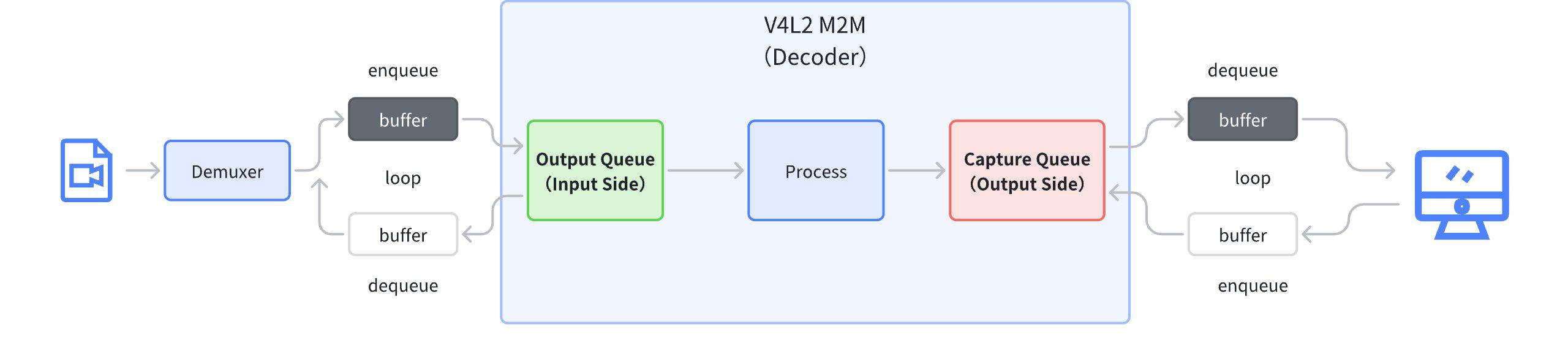
说明:在V4L2 M2M框架中,output queue 为数据的输入端。capture queue 始终作为输出端,主要是为保持与 V4L2 Camera 框架的队列使用习惯一致。
二、框架总览
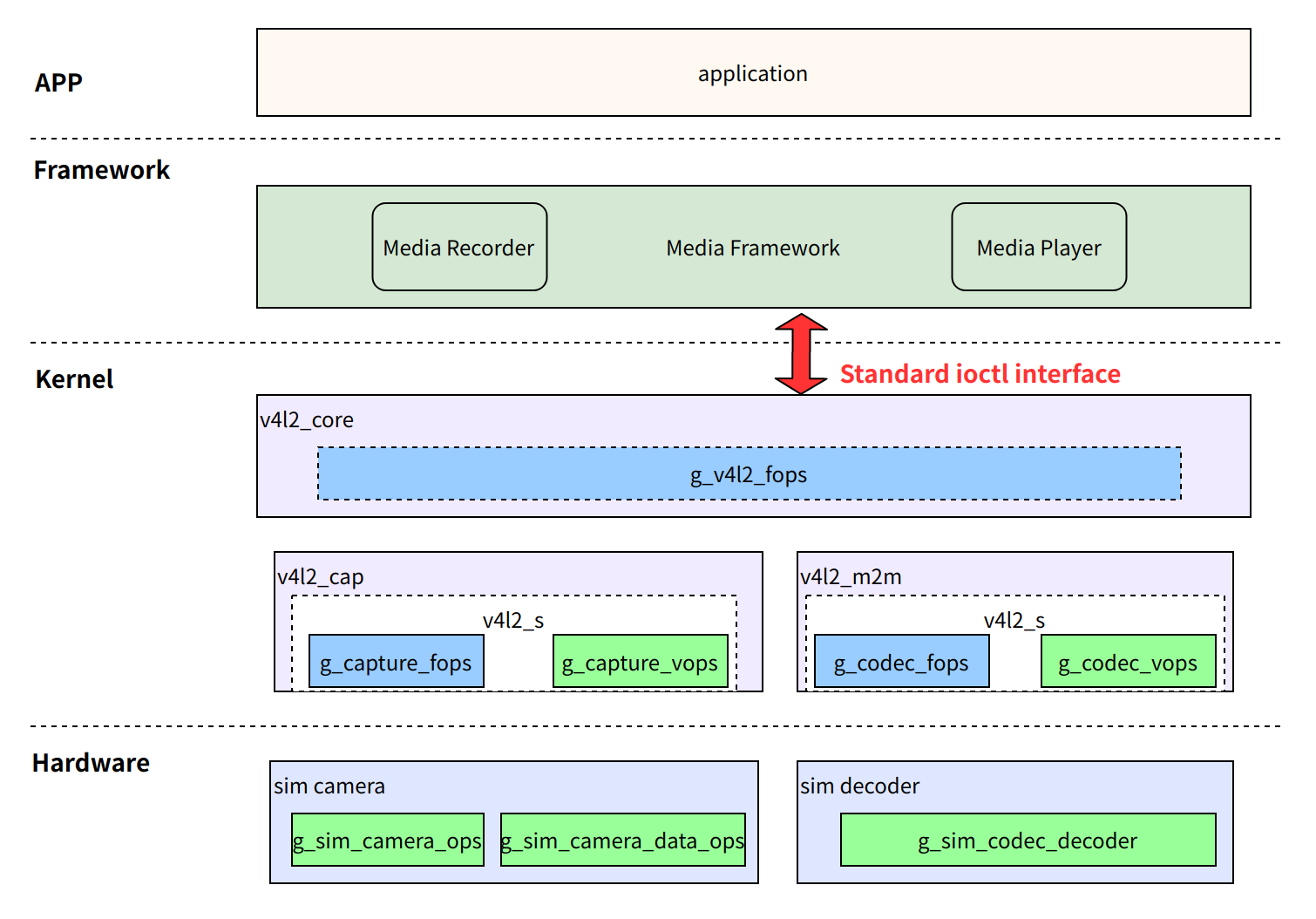
openvela V4L2 M2M框架采用经典的分层设计,将通用逻辑与设备特定实现解耦。这种模式类似于 openvela 音频驱动中的上层 (Upper-Half) 和下层 (Lower-Half) 模型。
对上层应用来说,openvela V4L2 M2M框架提供了兼容 Linux 标准的接口给应用使用;对底层的驱动开发者来说,openvela V4L2 M2M 框架简化了适配接口,可快速完成驱动开发。
-
V4L2 通用层 (Upper-Half):
- 由 v4l2_core、v4l2_cap (用于摄像头等捕捉设备) 和 v4l2_m2m (用于编解码设备) 模块构成,有对应的 capture ops 和 codec ops。
- 该层负责响应来自应用程序的 ioctl 系统调用,处理 V4L2 的核心逻辑、缓冲区管理和事件机制。它为下层驱动定义了一套标准的操作函数集(ops)。
-
设备驱动层 (Lower-Half):
- 由具体的硬件驱动程序构成,例如文档中用作示例的 sim_camera 和 sim_decoder。
- 驱动开发者的核心工作就是实现这一层。通过填充并注册特定的 ops 结构体,驱动即可与通用层无缝对接。
当系统启动后,下层驱动(如 sim_decoder)会注册相应的设备节点(如 /dev/video1)。应用程序通过标准文件接口访问这些节点,请求经由 V4L2 通用层,最终分派到对应的下层驱动进行处理。
三、框架详解
本章将深入剖析 openvela V4L2 M2M Codec 驱动的内部机制,涵盖其核心组件、接口定义、数据交互模型及关键开发实践。
1、核心组件
openvela 的 v4l2m2m 实现借鉴了 Linux 的成熟设计,其架构围绕以下四个核心组件构建:
- codec_ops_s: 下层驱动的核心实现。它定义了一套操作回调函数,功能对标 Linux 的 v4l2_ioctl_ops。驱动开发者的主要工作就是实现此接口。
- v4l2_ops_s: V4L2 通用 ioctl 接口。这是一个框架层(Upper-Half)的接口,M2M 通用层会提供一个该接口的实例 (g_codec_vops),它负责接收上层请求并调用到下层驱动的具体实现 (codec_ops_s)。
- codec_file_s: 设备实例管理器。每当应用程序 open 设备节点时,框架会创建一个 codec_file_s 实例来管理该会话的上下文,包括独立的缓冲区队列,从而实现多实例支持。并且 m2m 中对 buffer 的分配管理也是通过codec_file_s来完成。
- codec_mng_s: 设备顶层管理器。在驱动注册设备节点(如 /dev/video1)时,框架会创建一个 codec_mng_s 实例,作为该设备在内核中的全局句柄。
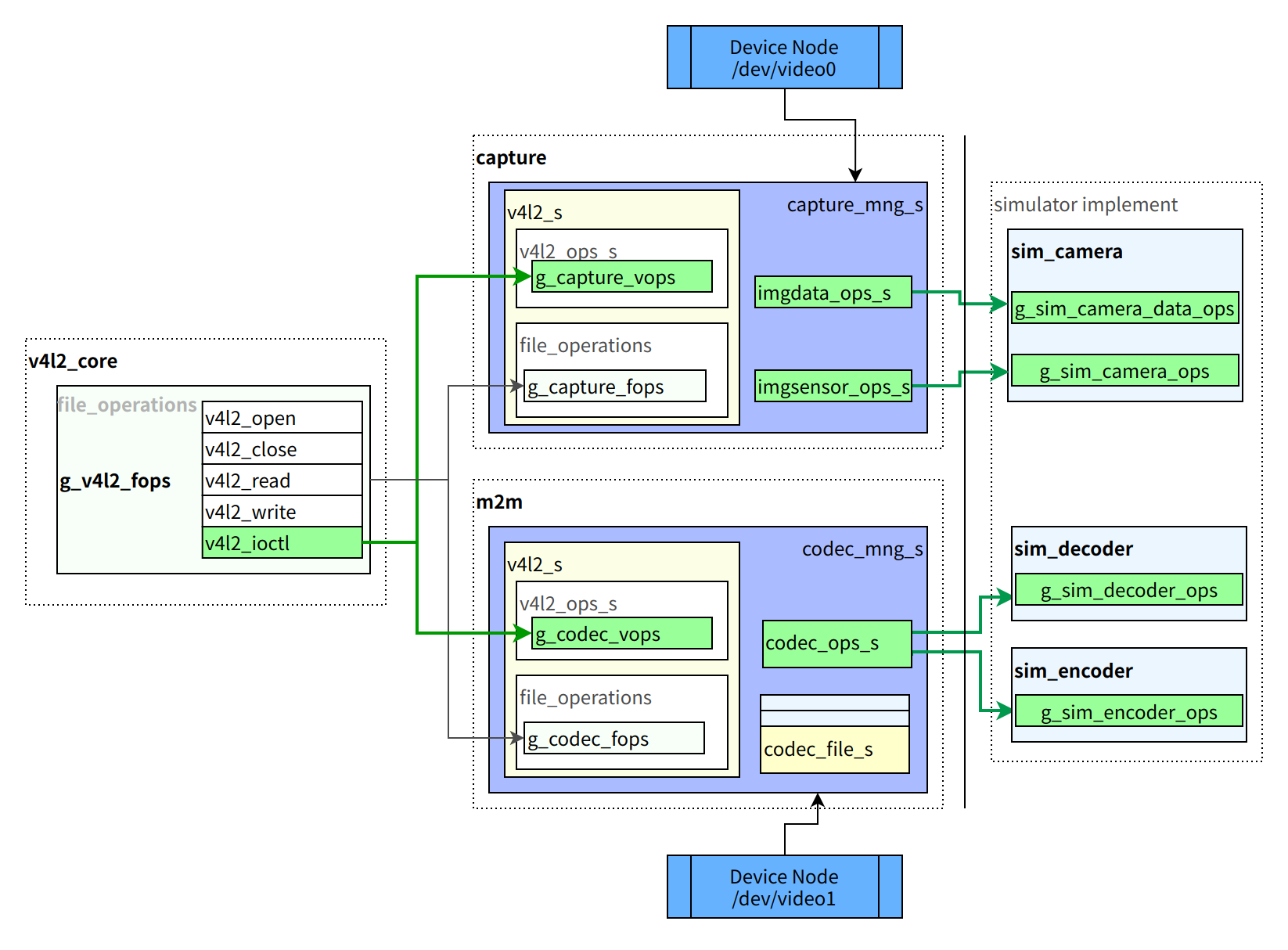
图注: 此图清晰展示了 v4l2_ops_s 作为通用入口,如何通过 codec_mng_s 和 codec_file_s 最终调用到驱动开发者实现的 codec_ops_s。
2、关键代码
V4L2 M2M 框架的逻辑主要分布在以下几个文件中:
-
nuttx/drivers/video/v4l2_core.c: V4L2 框架的总入口,定义了顶层文件操作 g_v4l2_fops,并将请求分发至 Camera 或 M2M 的实现。
-
nuttx/drivers/video/v4l2_m2m.c: M2M 通用层 (Upper-Half)。实现了 M2M 设备的通用逻辑,定义了 g_codec_fops 和 g_codec_vops,对应file_operations和v4l2_ops_s。这是下层驱动主要交互的模块。参考 sim_decoder,codec 的开发主要是 codec_ops_s的实现,以及完成输入输出 buffer 的对接。
-
nuttx/drivers/video/video_framebuff.c: V4L2 通用的缓冲区管理模块,为上层提供统一的缓冲区申请、排队和生命周期管理能力。
-
nuttx/drivers/video/v4l2_cap.c: Camera 设备的通用实现,Codec 开发一般不直接涉及。包括 image capture 和 video capture ,定义了 Camera 的g_capture_fops和g_capture_vops,对应file_operations和v4l2_ops_s。
3、接口与数据结构
本节详细介绍 M2M 驱动开发中涉及的关键数据结构和操作集。从顶层到底层顺序进行讲解。
codec_mng_t
codec_mng_t是设备总管理结构体,在调用codec_register驱动注册接口的时候,动态分配,并与driver实现接口进行绑定,以此实现将上层应用的请求转换到driver请求中。
struct codec_mng_s
{
struct v4l2_s v4l2; // v4l2 框架通用结构体,框架实现
FAR struct codec_s *codec; // v4l2 driver实现接口,Vendor实现
};v4l2_s
在openvelaV4L2框架中,一个V4L2设备对应的一个v4l2_s结构体,封装了指向设备具体操作的两个核心函数指针表:vops 和 fops。
- vops: 指向 v4l2_ops_s 结构体,定义了所有 V4L2 相关的 ioctl 操作。
- fops: 指向 file_operations 结构体,定义了标准的 VFS 文件操作(如 open, close, poll 等)。
根据设备类型,v4l2_s 会被实例化并指向不同的实现,例如 Camera 设备对应 g_capture_vops 和 g_capture_fops,而 M2M Codec 设备则对应 g_codec_vops 和 g_codec_fops。
struct v4l2_s
{
FAR const struct v4l2_ops_s *vops;
FAR const struct file_operations *fops;
};v4l2_ops_s
v4l2_ops_s 是 V4L2 框架中通用的 ioctl 操作函数集。它定义了所有 V4L2 设备(包括 Camera 和 M2M Codec)可能支持的操作的原型。当一个 ioctl 请求通过 VFS 传递到 V4L2 核心层后,最终会通过该结构体中的函数指针分发到具体设备类型的通用层(如 v4l2_m2m.c)进行处理。
struct v4l2_ops_s
{
CODE int (*querycap)(FAR struct file *filep,
FAR struct v4l2_capability *cap);
CODE int (*g_input)(FAR int *num);
CODE int (*enum_input)(FAR struct file *filep,
FAR struct v4l2_input *input);
CODE int (*reqbufs)(FAR struct file *filep,
FAR struct v4l2_requestbuffers *reqbufs);
CODE int (*querybuf)(FAR struct file *filep,
FAR struct v4l2_buffer *buf);
// ... 其他标准V4L2操作 ...codec_s
codec_s结构体中目前只包含codec_ops_s结构体,即只需要driver适配codec_ops_s接口即可。后续会更新实际需求,对codec_s结构体进行扩展。
struct codec_s
{
FAR const struct codec_ops_s *ops;
};codec_ops_s 是下层驱动(Lower-Half)必须实现的操作回调函数集合。驱动开发者需要根据硬件能力,实例化一个 codec_ops_s 结构体并填充其函数指针。codec_s 结构体则将该操作集与驱动的私有数据绑定起来。
/* 下层驱动需要实现的操作回调函数集合 */
struct codec_ops_s
{
/* 设备生命周期管理 */
CODE int (*open)(FAR struct codec_s *codec, void *arg);
CODE int (*close)(FAR struct codec_s *codec);
/* 流控制 */
CODE int (*capture_streamon)(FAR struct codec_s *codec);
CODE int (*output_streamon)(FAR struct codec_s *codec);
// ... 其他 streamon/streamoff 及 available 回调 ...
/* 标准 V4L2 IOCTLs 的具体实现 */
CODE int (*querycap)(FAR struct codec_s *codec, FAR struct v4l2_capability *cap);
CODE int (*capture_enum_fmt)(FAR struct codec_s *codec, FAR struct v4l2_fmtdesc *f);
// ... 其他 ops,如 g_fmt, s_fmt, g_parm, s_parm, events, cmds 等 ...
};
/* 将 ops 与驱动私有数据绑定 */
struct codec_s
{
FAR const struct codec_ops_s *ops;
FAR void *priv;
};说明: codec_ops_s 中的许多操作是可选的,驱动可以根据硬件支持的功能选择性地实现。
codec_file_t
codec_file_t (structcodec_file_s): 设备文件实例,在 open 时创建,其 priv 指针用于关联下层驱动的私有数据。它是实现多实例支持的关键,每个设备节点 open 一次,就会创建一个新的codec_file_t,对应不同的 codec context,实现了多实例的需求。
struct codec_file_s
{
codec_type_inf_t capture_inf; // capture queue buffer info
codec_type_inf_t output_inf; // output queue buffer info
sq_queue_t event_avail; // 存放可用事件单项链表
sq_queue_t event_free; // 存放空闲事件单项链表
codec_event_t event_pool[CODEC_EVENT_COUNT]; // 事件队列
FAR struct pollfd *fds;
FAR void *priv; // 存放driver的私有数据,在调用open接口时,driver可以将私有结构体指针存放在priv中,方便下次框架调用接口的时候使用
};-
codec_type_inf_t(struct codec_type_inf_s): 用于管理单一类型(Capture 或 Output)的缓冲区信息。
struct codec_type_inf_s { video_framebuff_t bufinf; /* video framebuff 队列 */ FAR uint8_t *bufheap; /* for V4L2_MEMORY_MMAP buffers */ bool buflast; }; -
codec_event_t(struct codec_event_s): 用于订阅 event 和管理 V4L2 事件的内部结构。
struct codec_event_s { sq_entry_t entry; struct v4l2_event event; };
g_codec_fops
g_codec_fops (struct file_operations)为 M2M 框架提供的通用全局文件操作实例接口,是一个全局静态变量。驱动注册后,v4l2_core 中的 fops 会直接调用 codec 的 fops,完成 codec 的 open/close/mmap/poll操作。
static const struct file_operations g_codec_fops =
{
codec_open, /* open */
codec_close, /* close */
NULL, /* read */
NULL, /* write */
NULL, /* seek */
NULL, /* ioctl */
codec_mmap, /* mmap */
NULL, /* truncate */
codec_poll, /* poll */
};g_codec_vops
g_codec_vops (struct v4l2_ops_s)为M2M框架提供的通用全局操作实例接口,是一个全局静态变量。 实现了 V4L2 的通用 ioctl 命令接口。这些函数作为适配层,其内部会调用下层驱动在 codec_ops_s 中注册的对应回调函数。例如,codec_querycap 函数最终会调用 (codec->ops->querycap)(...)。
/* M2M 通用层提供的 v4l2_ops_s 实现 */
static const struct v4l2_ops_s g_codec_vops =
{
codec_querycap, /* querycap */
NULL, /* g_input */
NULL, /* enum_input */
codec_reqbufs, /* reqbufs */
codec_querybuf, /* querybuf */
codec_qbuf, /* qbuf */
codec_dqbuf, /* dqbuf */
// ... 其他20余个已实现的接口 ...
codec_decoder_cmd, /* decoder_cmd */
codec_encoder_cmd /* encoder_cmd */
};4、缓冲区交互模型
V4L2 M2M 框架的核心是其双队列缓冲区模型。内存由 M2M 通用层根据用户空间的 VIDIOC_REQBUFS 请求进行分配和管理。下层驱动通过以下 API 与通用层进行缓冲区数据交换:
-
获取缓冲区:
- codec_output_get_buf(): 获取一个包含待处理数据(如 H.264 码流)的输入缓冲区。
- codec_capture_get_buf(): 获取一个空闲的、用于存放处理结果(如 YUV 数据)的输出缓冲区。
-
归还缓冲区:
- codec_output_put_buf(): 将已处理完毕的输入缓冲区归还给 M2M 通用层。
- codec_capture_put_buf(): 将已填充数据的输出缓冲区归还给 M2M 通用层,使其可被应用层读取。
FAR struct v4l2_buffer *codec_output_get_buf(FAR void *cookie); FAR struct v4l2_buffer *codec_capture_get_buf(FAR void *cookie); int codec_output_put_buf(FAR void *cookie, FAR struct v4l2_buffer *buf); int codec_capture_put_buf(FAR void *cookie, FAR struct v4l2_buffer *buf);
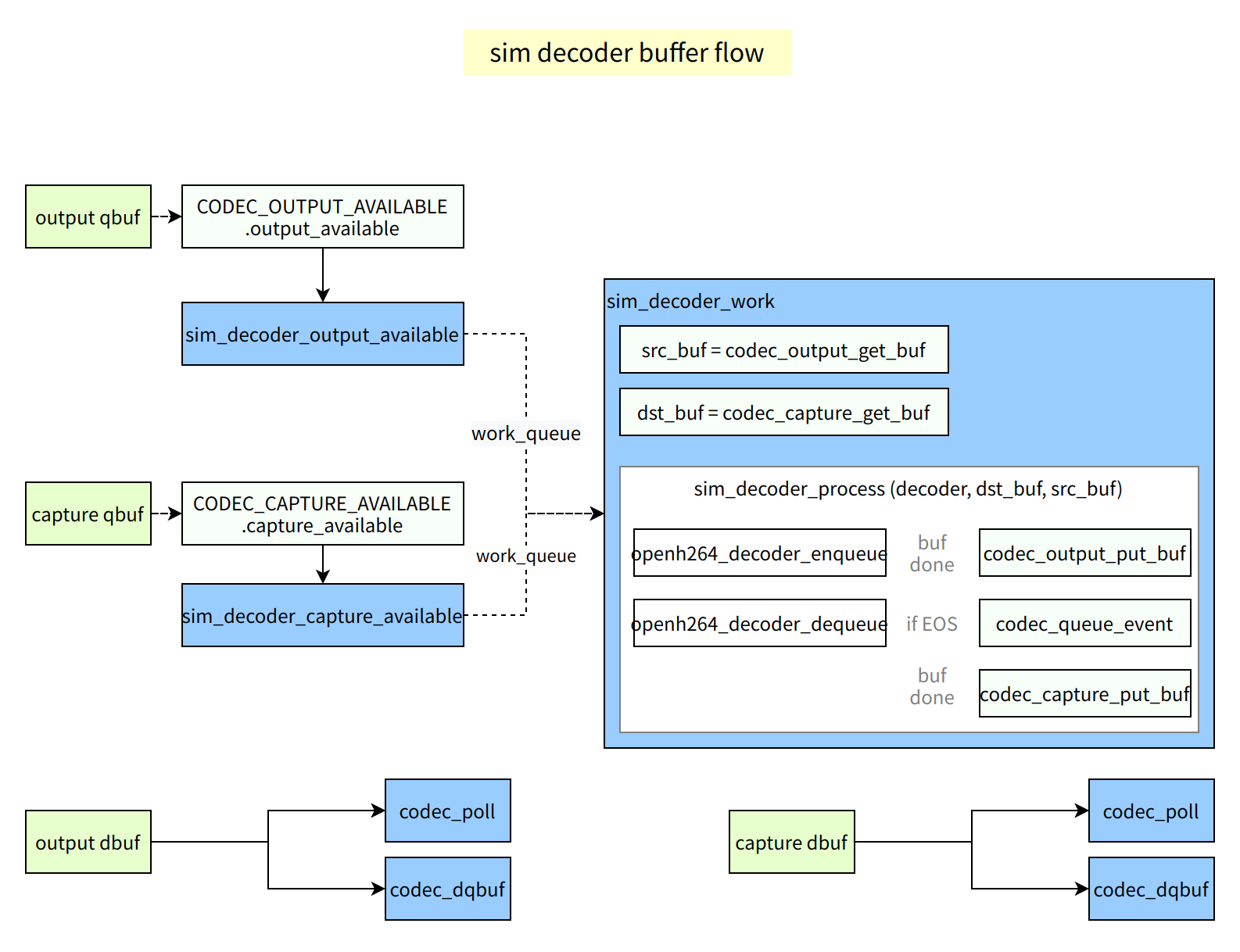
图注: 此图详细描绘了解码器驱动如何通过 get_buf 和 put_buf API 与 M2M 通用层进行输入和输出缓冲区的交换。
5、开发注意事项
- 缓冲区申请: 输入 (output) 和输出 (capture) 缓冲区均由用户空间通过 ioctl 的 VIDIOC_REQBUFS 命令触发申请,内存由 M2M 通用层统一分配和管理。
- 队列操作: 受限于 video_framebuff 的当前实现,不建议一次性将所有请求的 output 缓冲区都入队到 M2M。推荐的模式是:在入队一个新的 output 缓冲区之前,先尝试出队所有已处理完的缓冲区。
- 延迟初始化: sim_decoder 示例将 sim_openh264dec 的初始化推迟到 output_streamon 回调中执行。这种做法避免了在驱动探测(probe)阶段进行不必要的硬件初始化和关闭,是一种推荐的优化实践。
- Flush 操作: 在调用 output_streamoff 时,驱动应确保硬件中缓存的所有帧都被完全处理并输出。sim_decoder 通过设置 flush 标志并调度工作队列来清空解码器内部的剩余数据。