
本文档指导嵌入式开发者如何为 openvela 系统编写能够参与电源管理 (PM) 的设备驱动程序。通过实现指定的 PM 回调接口,您的驱动可以响应系统的功耗状态变化,从而实现精细化的节能控制。
目标读者:需要在特定硬件平台上为设备驱动添加 PM 功能的嵌入式系统开发者。
前置阅读: 在开始之前,我们强烈建议您首先阅读电源管理框架指南,以充分理解 PM 框架的核心概念,如电源状态 (State)、电源域 (Domain) 和决策者 (Governor)。
一、核心 API 与数据结构
驱动程序通过 pm.h 中定义的回调结构体和注册函数与 PM 框架进行交互。
相关头文件:openvela include/nuttx/power/pm.h
1、pm_state_e 电源状态枚举
此枚举定义了系统支持的逻辑电源状态。驱动程序在 PM 回调中会接收到此类型的目标状态,并需要根据该状态执行相应的硬件操作。
enum pm_state_e
{
PM_RESTORE = -1, /* 内部状态:通知驱动从低功耗恢复 */
PM_NORMAL = 0, /* 正常运行状态 */
PM_IDLE, /* 空闲状态 */
PM_STANDBY, /* 待机状态 */
PM_SLEEP, /* 休眠状态 */
PM_COUNT, /* 状态总数,用于内部管理 */
};- 注意:PM_IDLE、PM_STANDBY 和 PM_SLEEP 的具体硬件行为(如时钟频率、外设开关、内存模式等)由芯片平台代码定义和实现。
2、pm_callback_s 回调结构体
这是驱动程序参与 PM 的核心。您需要在驱动中定义一个此类型的变量,并实现其回调函数指针。在驱动程序初始化时,由 pm_register 函数注册到 PM 系统中。
struct pm_callback_s
{
// 用于内部双向链表
struct dq_entry_s entry;
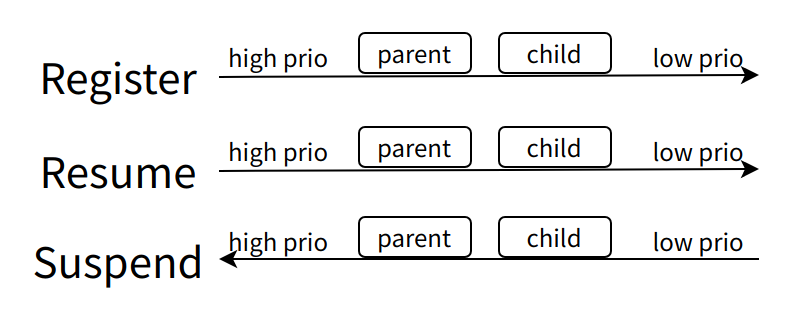
// 回调优先级。值越大,在进入低功耗状态时越早被调用。
// 默认或相同优先级则遵循注册顺序。
int prio;
CODE int (*prepare)(FAR struct pm_callback_s *cb, int domain,
enum pm_state_e pmstate);
CODE void (*notify)(FAR struct pm_callback_s *cb, int domain,
enum pm_state_e pmstate);
}性能须知:
PM 框架会在每次检查或改变电源状态时(如在系统空闲循环中)调用已注册的回调。为了不影响系统性能,您的回调函数必须快速、非阻塞。如果您的驱动仅需通知而无需准备,或反之,请将不需要的函数指针设置为 NULL 以避免不必要的函数调用。
prepare 回调函数
-
用途:在 PM 框架准备进入低功耗状态之前,会调用所有已注册 prepare 的设备是否就绪。例如,检查串口的 DMA 缓冲区或发送队列是否仍有数据待处理。
-
最佳实践:应优先考虑在业务逻辑层使用 Wakelock (PM wakelock用法) 来阻止系统休眠。仅当无法在业务层预知设备状态时(如突发的 DMA 请求),才使用 prepare 回调作为最后防线。
-
说明:如果仅需要 notify,prepare 需要设置成NULL,以减少不必要的函数调用。
-
参数:
- cb:您注册的回调结构体指针。
- domain:发起状态切换的电源域。
- pmstate:PM 框架期望进入的目标电源状态。
-
返回值:
- OK (0):表示设备已准备就绪,允许状态切换继续。
- <0:表示设备未就绪,PM 框架将中止本次状态切换。
notify 回调函数
当所有驱动的 prepare 回调都返回 OK 后,PM 框架会调用 notify 回调来执行实际的硬件操作。
- 用途:驱动程序根据通知的 domain 和目标状态 pmstate,执行实际的硬件电平转换。例如:关闭外设时钟、进入时钟门控、设置引脚状态、或从低功耗状态中恢复设备配置。
- 说明:如果仅需要 prepare,notify 需要设置成 NULL,以减少不必要的函数调用。
-
参数:
- cb:您注册的回调结构体指针。
- domain:发起状态切换的电源域。
- pmstate:PM 框架正在进入的目标电源状态。
-
返回值:无。此阶段不允许否决状态切换。
3、回调注册函数
pm_domain_register
将您的 pm_callback_s 结构体注册到指定 domain 的回调列表中。这是通用的注册接口,类似于 pm_register,但是适用于定义了多个 domain 的场景。
int pm_domain_register(int domain, FAR struct pm_callback_s *cb)pm_register
这是一个便利宏,用于将回调注册到默认的 PM_IDLE_DOMAIN (domain 0)。对于单核或不区分电源域的简单系统,使用此宏即可。
#define pm_register(cb) pm_domain_register(PM_IDLE_DOMAIN, cb)二、驱动开发实战:以 STM32 串口驱动为例
本节以 stm32f7 的串口驱动为例,展示如何一步步实现 PM 功能。
源码参考:arch/arm/src/stm32f7/stm32_serial.c
步骤 1:定义回调结构体和状态变量
在驱动文件中,定义一个包含 pm_callback_s 和其他 PM 相关状态的结构体。
#ifdef CONFIG_PM
/* 专用于 PM 的结构体,包含回调和驱动内部状态 */
static struct pm_config_s g_serialpm =
{
.pm_cb.notify = up_pm_notify, /* 关联 notify 实现 */
.pm_cb.prepare = up_pm_prepare, /* 关联 prepare 实现 */
.serial_suspended = false
};
#endif步骤 2:实现 prepare 回调
此函数负责在进入 STANDBY 或 SLEEP 状态前,检查串口是否有未完成的数据传输。
static int up_pm_prepare(struct pm_callback_s *cb, int domain,
enum pm_state_e pmstate)
{
int n;
/* Logic to prepare for a reduced power state goes here. */
switch (pmstate)
{
case PM_NORMAL:
case PM_IDLE:
break;
case PM_STANDBY:
case PM_SLEEP:
#ifdef SERIAL_HAVE_RXDMA
/* 确保所有 DMA 操作已同步 */
stm32_serial_dma_poll();
#endif
/* 遍历所有已初始化的串口设备 */
for (n = 0; n < STM32F7_NUSART + STM32F7_NUART; n++)
{
struct up_dev_s *priv = g_uart_devs[n];
if (!priv || !priv->initialized)
{
/* Not active, skip. */
continue;
}
if (priv->suspended)
{
/* Port already suspended, skip. */
continue;
}
if (priv->dev.isconsole)
{
/* Allow losing some debug traces. */
continue;
}
/* 若发送或接收缓冲区非空,则返回错误以阻止休眠 */
if (priv->dev.xmit.head != priv->dev.xmit.tail)
{
return ERROR;
}
if (priv->dev.recv.head != priv->dev.recv.tail)
{
return ERROR;
}
}
break;
default:
/* Should not get here */
break;
}
return OK;
}在进入 PM_STANDY,PM_SLEEP 状态值之前,driver 会检测串口的缓冲区是否还有数据:
- 如果有,就会返回 ERROR,阻止 PM 进入该低功耗状态。
- 其他情况则返回 OK, PM 系统可以正常进入该低功耗状态。
步骤 3:实现 notify 回调
此函数根据 PM 框架的最终决定,执行挂起或恢复串口的操作。
static void up_pm_notify(struct pm_callback_s *cb, int domain,
enum pm_state_e pmstate)
{
switch (pmstate)
{
case PM_NORMAL:
{
/*
* 目标状态是活动状态 (NORMAL/IDLE) 或从休眠唤醒 (RESTORE),
* 此时应恢复串口功能。
*/
up_pm_setsuspend(false);
}
break;
case PM_IDLE:
{
up_pm_setsuspend(false);
}
break;
case PM_STANDBY:
{
/* 目标状态是低功耗状态,挂起串口功能 */
up_pm_setsuspend(true);
}
break;
case PM_SLEEP:
{
up_pm_setsuspend(true);
}
break;
default:
/* Should not get here */
break;
}
}在 pm_notify 里面分了两种情况
- <= PM_IDLE 时:调用 up_pm_setsuspend(false)
- >= PM_IDLE 时:调用 up_pm_setsuspend(true)
static void up_pm_setsuspend(bool suspend) { int n; /* Already in desired state? */ if (suspend == g_serialpm.serial_suspended) { return; } g_serialpm.serial_suspended = suspend; for (n = 0; n < STM32F7_NUSART + STM32F7_NUART; n++) { struct up_dev_s *priv = g_uart_devs[n]; if (!priv || !priv->initialized) { continue; } up_setsuspend(&priv->dev, suspend); } }
up_pm_setsuspend() 函数是实际执行硬件操作的地方。
-
挂起 (suspend) 操作:
- 如果有流控,先拉高 GPIO 阻止继续接收 RX 数据。
- 关闭 TX 中断,阻止接收 TX 数据。
- 清空串口目前的 TX FIFO 里面数据。
- 如果有 DMA,停止 DMA。
- 最佳实践:为了最大化节能,还应在此处关闭相关模块的时钟,并在可能的情况下关闭相关模块的电源。
-
恢复 (resume) 操作:
- 最佳实践:打开相关模块时钟和电源。
- 如果有 DMA,打开 DMA。
- 重启串口 TX 中断。
处理 PM_RESTORE 状态
PM_RESTORE 是一个特殊的通知,它告诉驱动系统正在从 STANDBY 或 SLEEP 状态唤醒。驱动必须在此通知中执行恢复操作。
在某些简单场景下(如本串口示例),恢复操作可能与进入 PM_NORMAL 状态的操作相同。但在需要显式管理时钟和电源的复杂驱动中(例如 Regulator 驱动),必须在 case PM_RESTORE 分支中处理硬件的恢复。
当前驱动未处理 PM_RESTORE,低功耗退出之后功能会自动恢复,如果需要进行时钟开关动作需要在 notify 中同步进行 resume。
源码参考:regulator.c 对 PM_RESTORE 的处理
步骤 4:在驱动初始化时注册回调
最后,在驱动的初始化函数(如 arm_serialinit)中,调用 pm_register 将您的回调注册到 PM 框架。
#ifdef CONFIG_PM
ret = pm_register(&g_serialpm.pm_cb);
if (ret < 0)
{
/* 处理注册失败的错误 */
}
#endif三、核心要点与最佳实践
- 执行上下文:PM 回调函数 IDLE 线程中执行,此时中断可能被部分或全部禁用。因此,回调实现必须极其高效、非阻塞,且严禁任何可能导致线程切换的操作(如获取信号量)。
- 注册:驱动程序通过 pm_domain_register() 向特定的电源域注册回调。pm_register() 是注册到默认域 PM_IDLE_DOMAIN 的简化宏。您的回调函数应检查传入的 domain 参数,以支持多域系统。
- 在 prepare 函数中,检查当前模块是否允许进入 pm_state,如果存在问题,需要返回错误码。
-
在 notify 函数中,执行 pm_state 相关的操作,确保驱动进入相对应的低功耗状态,操作包括但不限于:
- 停止数据传输(DMA和中断)。
- 关闭模块时钟。
- 关闭模块电源。