
一、概述
本文档为嵌入式系统开发者提供在 openvela 实时操作系统中,使用 pm_idle 接口实现标准化空闲 (Idle) 线程功耗管理的方法。
openvela 提供 pm_idle 接口,旨在为单核 (Uniprocessor, UP) 和对称多处理 (Symmetric Multiprocessing, SMP) 架构提供统一、标准的 Idle 线程处理流程。该接口封装了复杂的电源状态决策和多核同步逻辑,可显著简化特定于平台的 (Platform-specific) up_idle 函数实现,降低开发风险。
目标读者: 负责实现或维护平台底层电源管理逻辑的嵌入式软件工程师。
前置阅读: 在开始之前,我们强烈建议您首先阅读以下文档,以了解 openvela 电源管理的基础概念:
二、API 参考
pm_idle 接口定义根据系统是否启用 SMP (CONFIG_SMP) 而有所不同。
1、单核 (UP) 场景
在单核场景下,系统只管理一个全局的电源状态(System State)。开发者仅需提供一个回调函数来响应此状态。
函数指针: pm_idle_handler_t
定义一个回调函数,用于处理系统进入不同功耗状态前的操作。
typedef void (*pm_idle_handler_t)(enum pm_state_e systemstate);- systemstate: enum pm_state_e 类型,表示系统将要进入的目标电源状态,例如 PM_SLEEP。
核心函数: pm_idle
在系统的 Idle 循环 (up_idle) 中调用此函数。它会计算当前系统可进入的最低功耗状态,并调用您提供的 handler。
void pm_idle(pm_idle_handler_t handler);- handler:pm_idle_handler_t 类型的函数指针,指向平台相关的电源状态处理回调函数。
2、多核 (SMP) 场景
在 SMP 场景下,每个 CPU Core 拥有独立的电源状态(CPU State),同时整个系统也存在一个共享的电源状态(System State)。pm_idle 接口扩展了其功能以协调多核行为。
函数指针: pm_idle_handler_t
回调函数的定义增加了 cpu 和 cpustate 参数,以处理特定核心的状态,并返回一个布尔值,用于标识该核心是否为最后一个唤醒的核心。
typedef bool (*pm_idle_handler_t)(int cpu,
enum pm_state_e cpustate,
enum pm_state_e systemstate);- cpu:当前执行此回调函数的 CPU 核心 ID。
- cpustate:enum pm_state_e 类型,表示当前核心将要进入的电源状态。
- systemstate:enum pm_state_e 类型,表示当所有核心都进入 Idle 后,系统将进入的共享电源状态。
- 返回值:bool 类型。如果当前核心是第一个从 WFI 状态唤醒并负责恢复系统级资源的核心,则返回 true;否则返回 false。
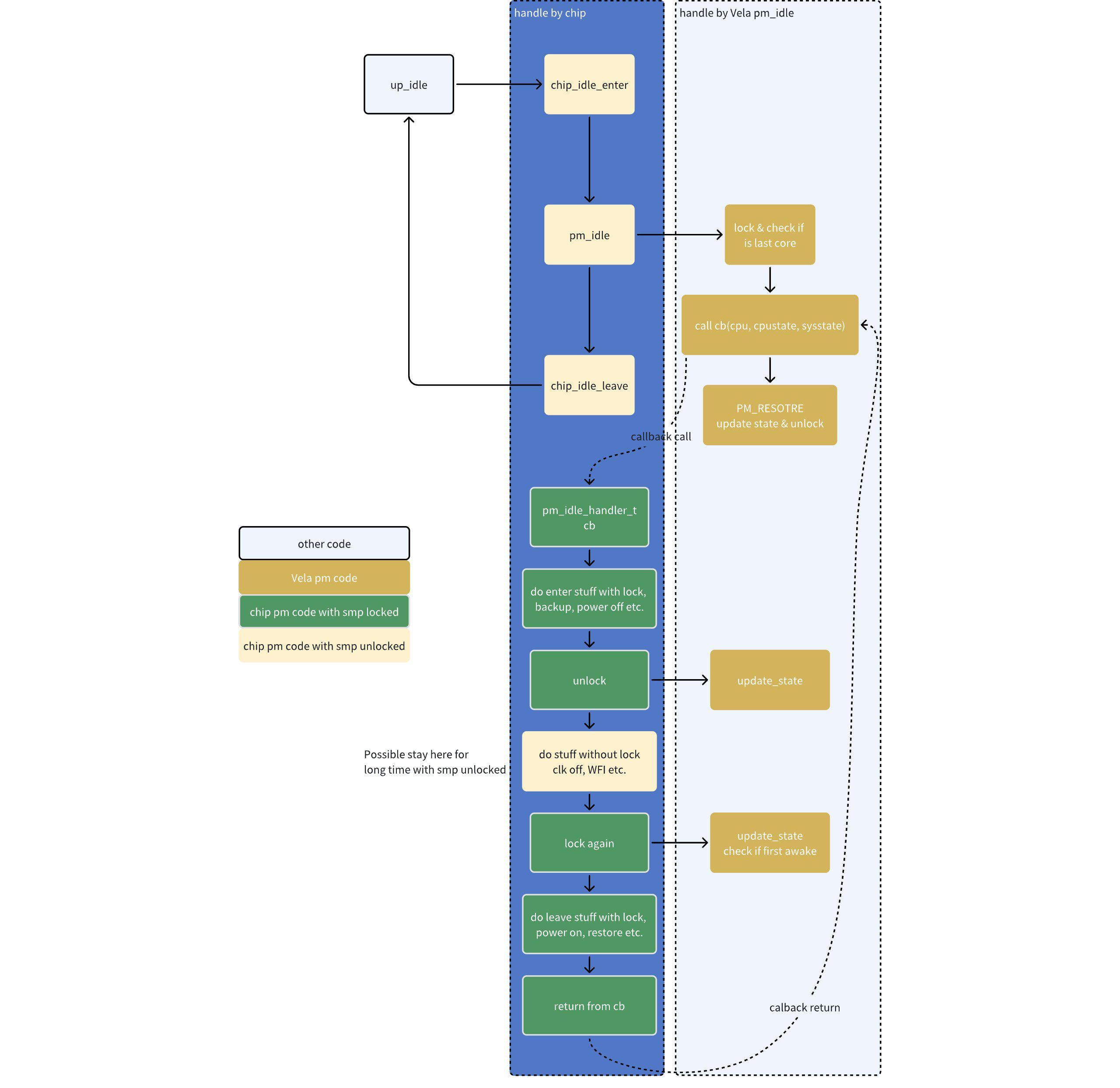
下图展示了 pm_idle 如何与平台代码(chip_idle_...)和用户回调(pm_idle_handler_cb)协作,共同完成一次完整的 SMP Idle 流程。
核心函数: pm_idle
与单核版本类似,在每个核心的 Idle 循环中调用。
void pm_idle(pm_idle_handler_t handler);- handler:pm_idle_handler_t 类型的函数指针,指向平台相关的电源状态处理回调函数。
多核同步接口
在 SMP 场景中,为确保各核心能安全地进入和退出低功耗状态,pm_idle 框架内部管理着核心间的同步锁。但在平台相关的回调函数 (handler) 中,您必须在精确的时机手动调用 pm_idle_unlock 和 pm_idle_lock 来配合框架完成同步。
其核心机制是:
- pm_idle 框架在调用您的 handler 之前获取锁。
- 您的 handler 在进入 WFI 之前调用 pm_idle_unlock() 释放锁。
- 您的 handler 在从 WFI 唤醒后调用 pm_idle_lock() 重新获取锁,并借此判断自己是否为第一个唤醒的核心。
- pm_idle 框架在 handler 返回后最终释放锁。
pm_idle_unlock
在进入 WFI (Wait For Interrupt) 指令之前调用。此函数释放核心间的同步锁,允许其他核心继续其 pm_idle 流程。调用此函数后,不应再执行任何依赖多核同步的操作(例如访问共享资源)。
void pm_idle_unlock(void);pm_idle_lock
在从 WFI 指令唤醒之后立即调用。此函数重新获取核心间的同步锁,并判断当前核心是否为第一个被唤醒的核心。
bool pm_idle_lock(int cpu);三、实现指南
参考在 IDLE 线程中实现电源管理的实现,pm_idle.c 中将流程进行了标准化,只暴露了 handler 作为参考IDLE 线程中 switch 部分的处理。
1、单核 (UP) 场景实现
在单核系统中,up_idle 的实现非常直接。您只需将平台相关的低功耗指令(如 WFI)封装在回调函数 up_pm_idle_handler 中,并将其传递给 pm_idle。
/*
* 定义平台相关的电源状态处理函数。
* 在所有支持的低功耗状态下,都执行 WFI 指令使 CPU 等待中断。
*/
static void up_pm_idle_handler(enum pm_state_e state)
{
switch (state)
{
case PM_NORMAL:
case PM_IDLE:
case PM_STANDBY:
case PM_SLEEP:
default:
/* 执行让 CPU 进入低功耗等待状态的指令 */
up_cpu_wfi();
break;
}
}
/*
* 实现 OS 的 Idle 线程主函数。
* 在循环中调用 pm_idle,将电源管理逻辑委托给 PM 框架。
*/
void up_idle(void)
{
pm_idle(up_pm_idle_handler);
}2、多核 (SMP) 场景实现
在 SMP 系统中,handler 的实现更为复杂,因为它必须同时处理 CPU Domain 和 System Domain 的电源状态转换,并正确使用 lock/unlock 接口进行同步。
工作流程
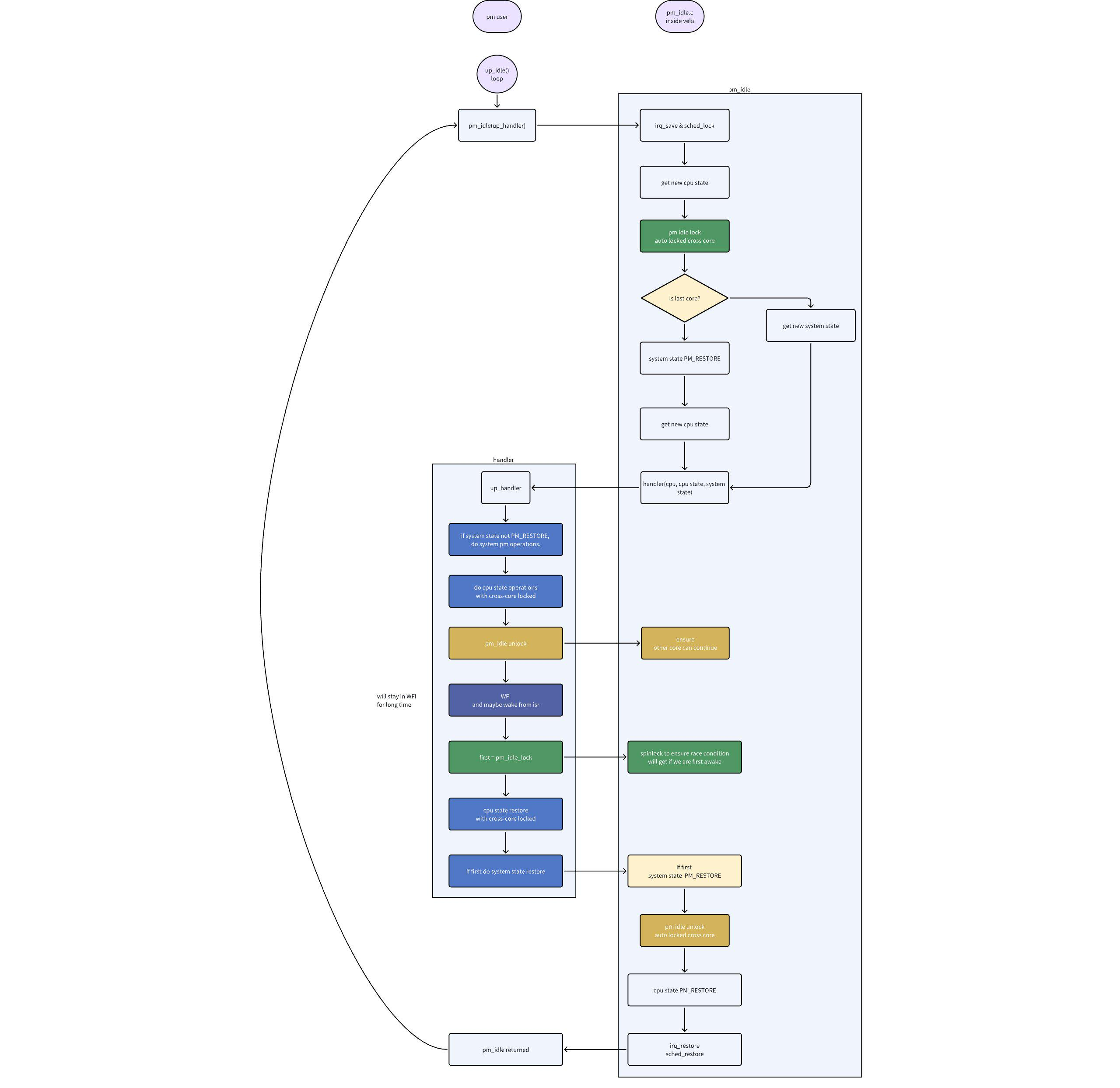
下图详细展示了 pm_idle 在 SMP 场景下的内部逻辑,以及 pm_idle 与平台回调函数 handler 之间的交互时序。
代码示例
以下示例演示了典型的 SMP handler 实现结构,其步骤与上述工作流程图一一对应。
static bool up_pm_idle_handler(int cpu,
enum pm_state_e cpu_state,
enum pm_state_e system_state)
{
bool first = false;
switch (cpu_state)
{
case PM_NORMAL:
case PM_IDLE:
case PM_STANDBY:
case PM_SLEEP:
/*
* 步骤 1: 执行 CPU Domain 的低功耗准备操作。
* 例如:关闭该核心的特定时钟或调节其电压。
* 此时多核同步锁仍被持有。
*/
/* do cpu domain pm enter operations */
asm("NOP");
/*
* 步骤 2: 如果系统状态有效,执行System Domain的低功耗准备操作。
* pm_idle 内部机制确保此部分逻辑通常仅由最后一个进入 idle 的核心执行。
*/
if (system_state >= PM_NORMAL)
{
switch (system_state)
{
case PM_NORMAL:
case PM_IDLE:
case PM_STANDBY:
case PM_SLEEP:
/* do system domain pm enter operations */
asm("NOP");
break;
default:
break;
}
}
/*
* 步骤 3: 释放多核同步锁,准备进入 WFI。
* 此后不能再执行需要多核同步的操作。
*/
pm_idle_unlock();
/*
* 步骤 4: 执行 WFI 指令,CPU 将在此处暂停,直到中断发生。
*/
up_cpu_wfi();
/*
* 步骤 5: 从 WFI 唤醒后,立即获取多核同步锁。
* 函数返回 true 表示本核心是第一个唤醒的。
*/
first = pm_idle_lock(cpu);
/*
* 步骤 6: 如果是第一个唤醒的核心,执行恢复系统级共享资源的操作。
*
*/
if (first)
{
/* do system domain pm leave operations */
asm("NOP");
}
/*
* 步骤 7: 执行 CPU 域的恢复操作。
* 此时多核同步锁已重新持有。
*/
/* do cpu domain pm leave operations */
asm("NOP");
break;
default:
break;
}
/* 返回唤醒状态,通知 pm_idle 框架本核心是否为第一个唤醒者 */
return first;
}
void up_idle(void)
{
pm_idle(up_pm_idle_handler);
}四、驱动适配指南
当驱动程序需要响应电源状态变化时,您需要将其回调函数注册到正确的电源域 (Power Domain)。
System Domain (PM_IDLE_DOMAIN)
- 行为: system_state 的状态变化会通知注册到 PM_IDLE_DOMAIN 的驱动。
- 兼容性: 为了与单核用法保持兼容,标准的 pm_register 和 pm_unregister 接口默认将回调注册到此域。
- 用途:适用于需要响应系统级(所有核心共享的)电源状态变化的驱动,例如操作主内存控制器或共享总线。
注意:如果您希望驱动回调 (struct pm_callback_s) 能接收来自其他特定域的状态变化通知,必须使用 pm_domain_register / pm_domain_unregister 接口,并明确指定 domain ID。
CPU Domain
-
行为: 如果驱动程序或其控制的硬件与某个特定的 CPU Core 强相关,您应将其注册到该核心对应的 CPU Domain。
-
获取 Domain ID: 使用 PM_SMP_CPU_DOMAIN(cpu) 宏来获取指定核心的 Domain ID。
# define PM_SMP_CPU_DOMAIN(cpu) (CONFIG_PM_NDOMAINS - CONFIG_SMP_NCPUS + (cpu)) /* 获取当前核心的 Domain ID */ int domain = PM_SMP_CPU_DOMAIN(this_cpu()); /* 使用 domain ID 注册回调 */ pm_domain_register(domain, &my_driver_pm_cb); -
用途: 适用于管理仅由单个核心使用的外设,例如核心私有的定时器 (per-core timer) 或中断控制器。